Delve into a collection of my revent notable projects, each representing a fusion of creativity and skill.
Overview
NEW
Exechon Algorithm
2025
Learning-assisted Drifting
2024
Video Panoptic Segmentation
2024
Perception-enabled Pure Pursuit
2023
High-performance Control Design
2023
Policy Learning for an Unbalanced Disc
2023
U-Net Semantic Segmentation
2023
Autonomous Multi-Drone Coordination
2023
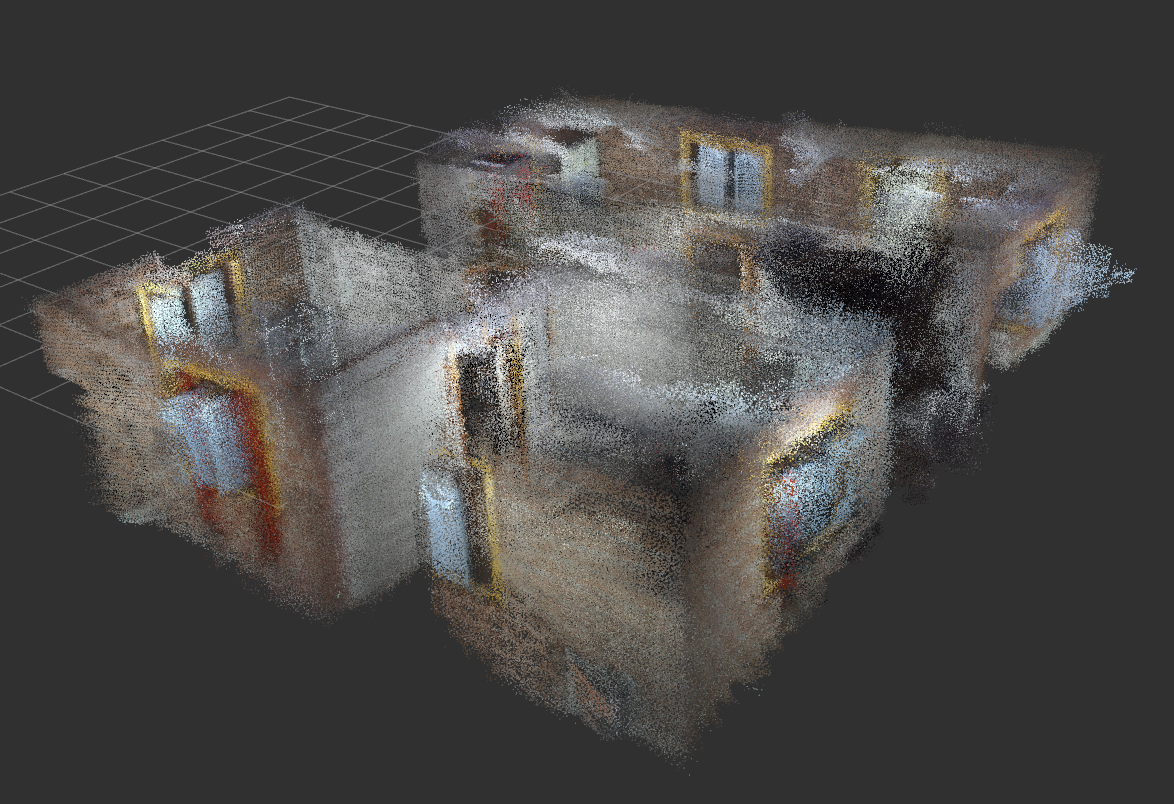
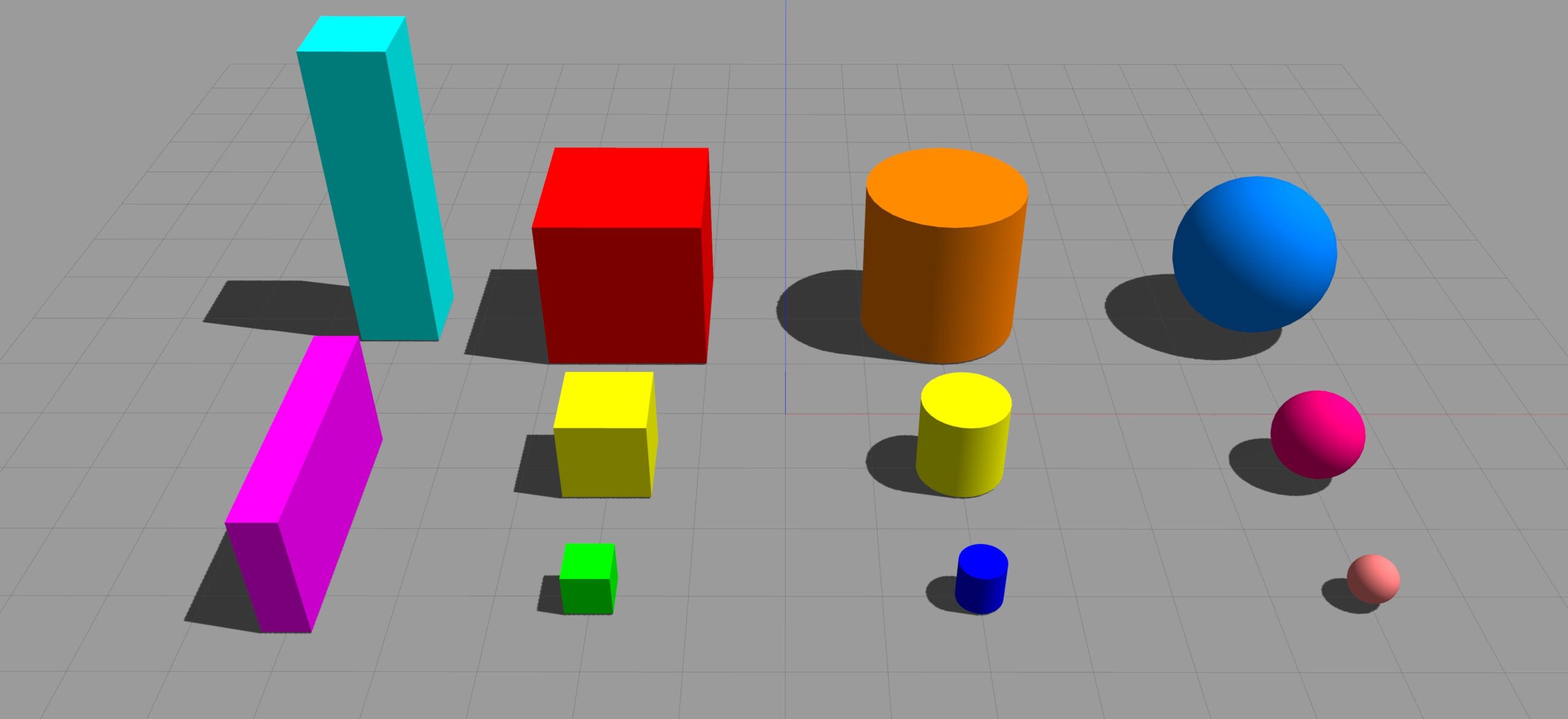
3D Point Cloud Filtering
2023
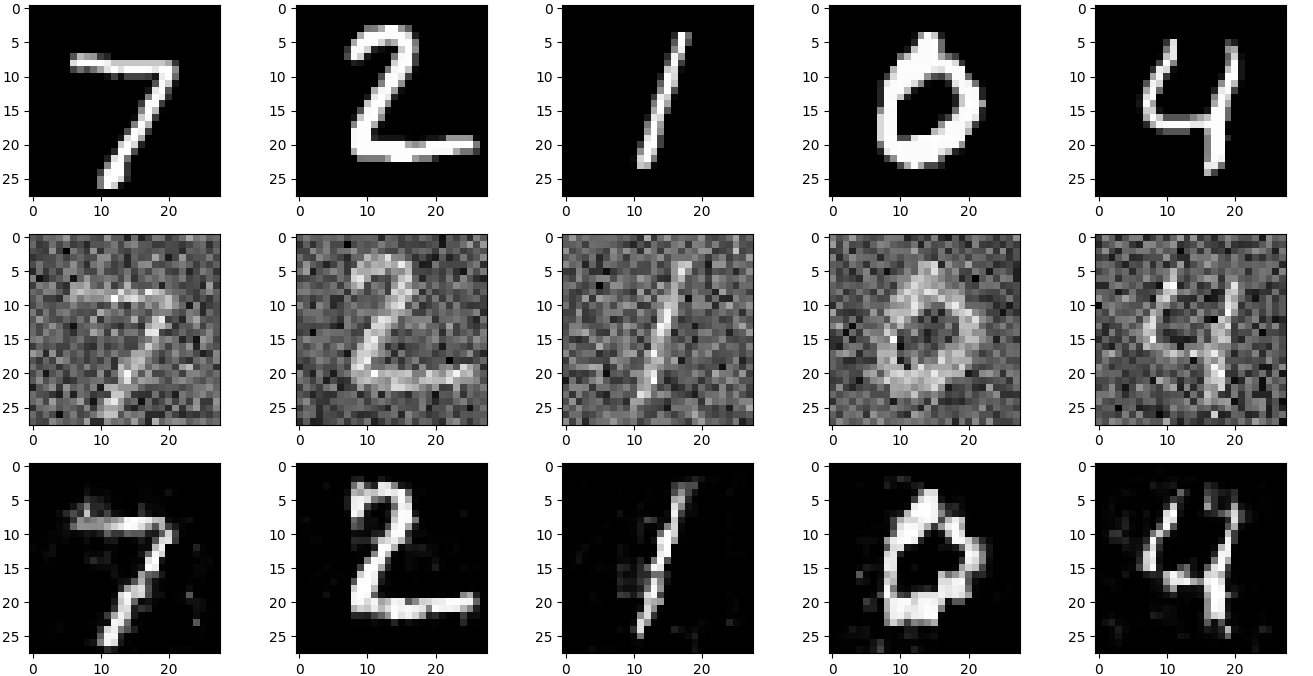
Anomaly Detection with Autoencoders
2023
Exercise Activity Detector
2022
Autonomous Drone Navigation
2021
NEW
2025
Exechon Algorithm
Python
SQL
ETL
API Integration
Optimization
Sentiment Analysis
small-team personal project
Exechon is a modular, layered analytics platform that turns raw SEC 13F filings, stock financial data and real-time news into insight-ready data. A rich CLI and interactive visualizations let professionals explore “what-if” scenarios, stress-test strategies, fine-tune simulations and parameters, and compare performance to similar benchmarks. Its clean architecture, smart storage layer, and extensible design make Exechon a single, scalable hub for data-driven investment research.
Efficient Frontier Allocation
Parameter Optimization
Buy-and-hold Simulation
Buy-side Simulation with rebalancing
2024
Learning-assisted Drifting for F1Tenth Autonomous Race Cars
Python
Matlab
ROS
Optimization
Machine Learning
Control Systems
Associated with TU/e (MSc Thesis)
Developed an advanced control framework for autonomous drifting using small-scale F1Tenth vehicles, integrating automated gain tuning and Gaussian Process-based model augmentation to enhance control accuracy and path tracking in complex trajectories.
Depth-Aware Video Panoptic Segmentation & Monocular Depth Estimation
Python
Deep Learning
Neural Networks
High Performance Computing
Associated with TU/e
Developed a multimodal deep neural network for simultaneous panoptic segmentation and monocular depth estimation from still images, enhancing depth-aware scene understanding.
Semantic Segmentation using a UNet-based Architecture
Python
Deep Learning
Generative AI
Encoders
Associated with TU/e
Developed a robust semantic segmentation model for urban street scenes using a U-Net-based architecture, addressing challenges in class imbalance, image quality degradation, and generalization. Enhanced performance through data augmentation, external datasets, transfer learning, and adaptive class weighting, demonstrating improved segmentation on the Cityscapes dataset.
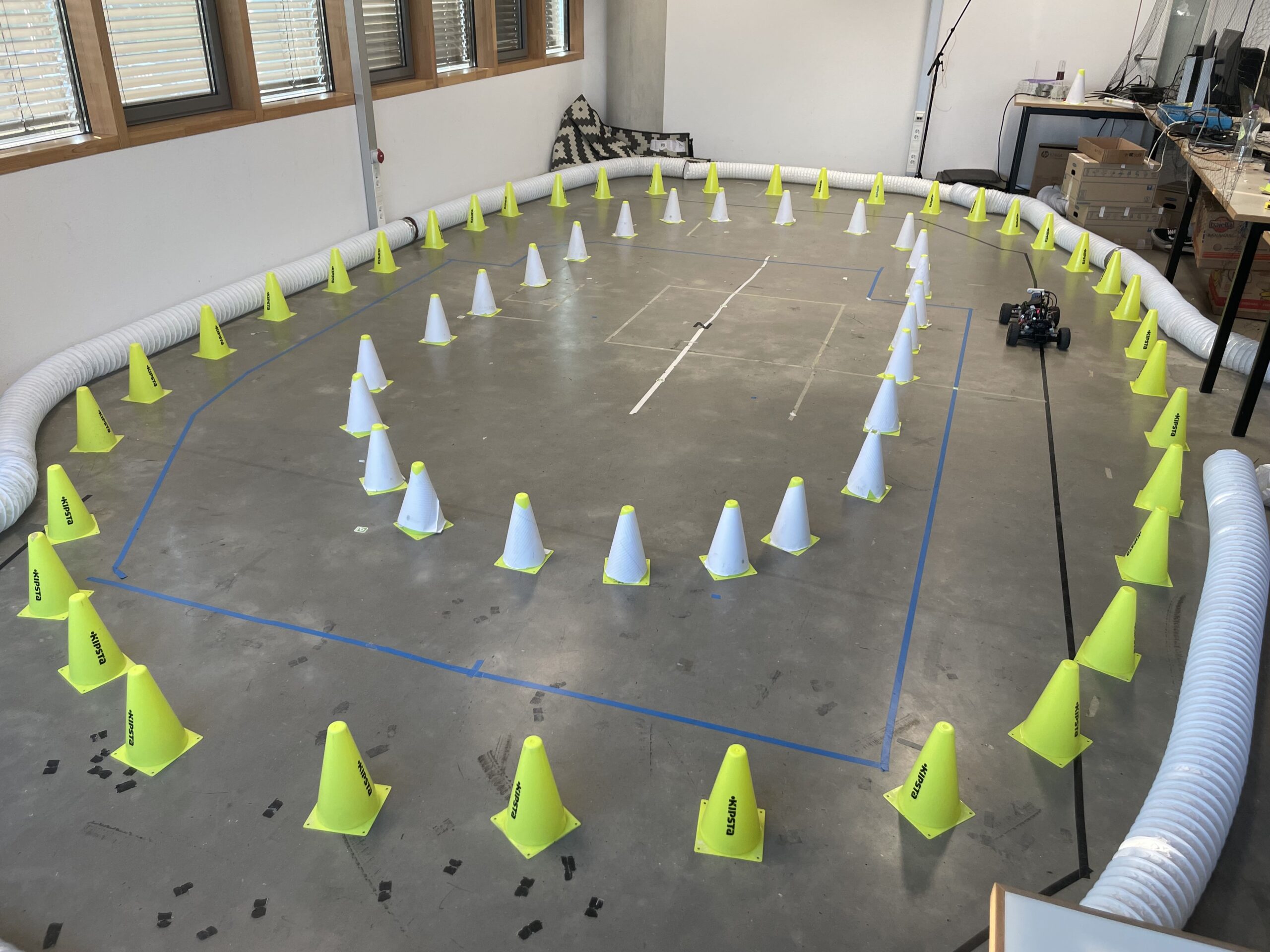
Perception-enabled Pure Pursuit for Small Scale Racing Cars
Python
Deep Learning
Object Detection
ROS
Controller
Reinforcement Learning
Associated with TU/e
Developed an autonomous agent for small-scale racing cars to navigate unknown racetracks using object detection for cones and a 2D environmental map. Implemented and modified a geometric controller for improved adaptability and speed while conducting a theoretical analysis of reinforcement learning for decision-making.
High-Performance Control Design for a Fourth-Order Rotational Motion Setup
Matlab
Simulink
Control Theory
Frequency Analysis
Associated with TU/e
Designed and implemented a high-performance control system for a fourth-order rotational motion setup, significantly improving trajectory tracking accuracy using advanced feedback and feedforward techniques.
Developed a control policy for an unbalanced disc pendulum system using Gaussian Processes, Neural Networks, and Reinforcement Learning, enabling successful swing-up and stabilization while extending control to multiple target positions.
Autonomous Multi-Drone Coordination for Wildfire Detection and Suppression
MATLAB
Control Theory
Flocking
Multi-agent Systems
LTL Specifications
Associated with TU/e
Developed and implemented autonomous control strategies for a swarm of firefighting drones, focusing on fire detection, monitoring, and suppression in dynamic environments. Designed and linearized UAV motion models, synthesized controllers for safe navigation, and implemented formation and leader-follower flocking control for coordinated drone movement. Optimized fire suppression efficiency by simulating bushfire behavior and adapting drone formations, demonstrating improved coverage and responsiveness. The project successfully integrated multi-agent coordination and control theory, enhancing UAV autonomy in disaster response scenarios.
Developed a custom Robot Operating System (ROS) node to filter a noisy cumulative point cloud, enhancing data quality for improved perception and navigation in robotic applications.
Implemented and analyzed an autoencoder from scratch for anomaly detection on the MNIST dataset, leveraging unsupervised learning to detect deviations from normal digit patterns.
Developed an Unsupervised Machine Learning-Based Activity Detector by applying K-means clustering and probabilistic modeling to sensor recordings. Preprocessed data, explored deterministic approaches for clustering, and implemented a detection system capable of identifying distinct activities based on sensor inputs.
2021
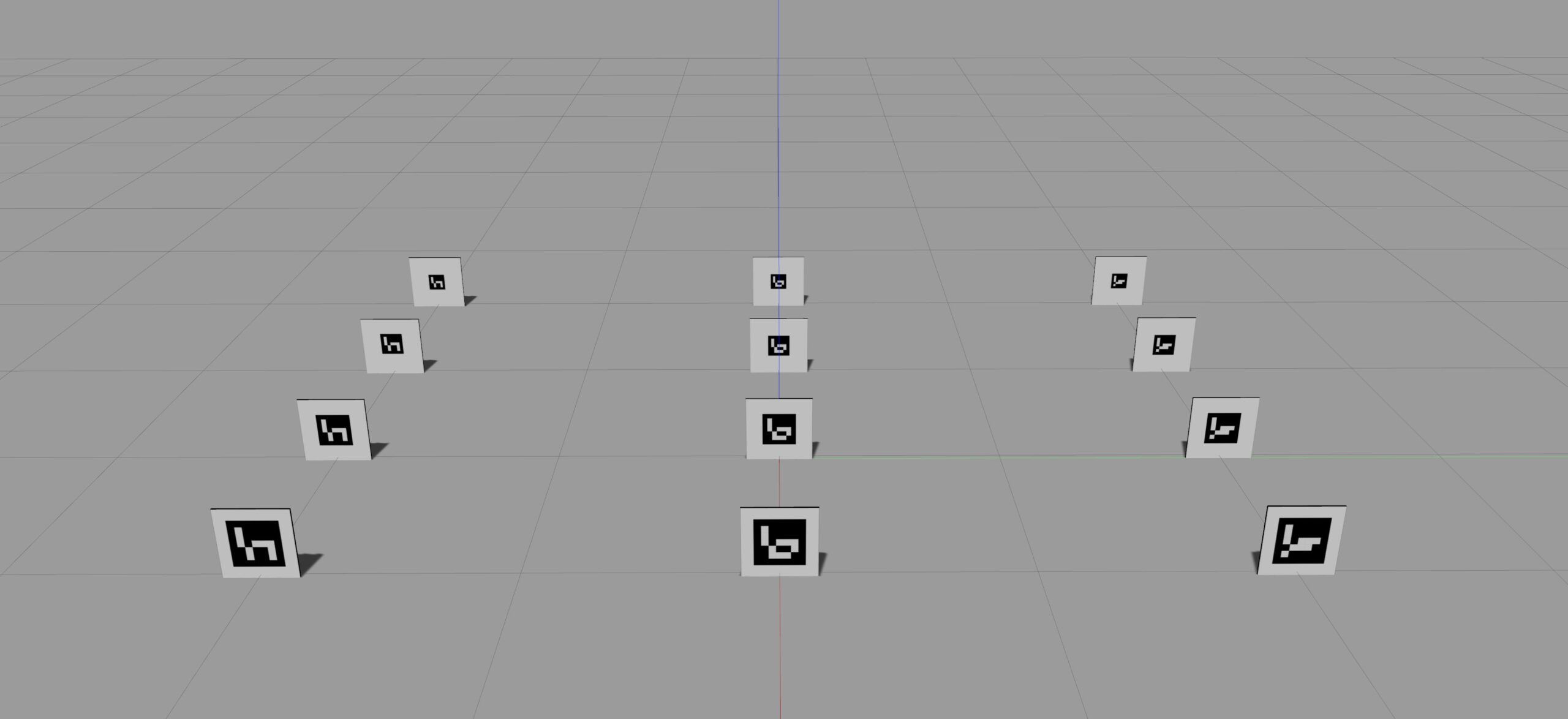
Autonomous Drone Navigation for Landmark Position Estimation using Reinforcement Learning
Python
Reinforcement Learning
ROS
Neural Networks
Unsupervised Learning
Associated with TUC
Developed a mapless UAV autonomous navigation system using deep reinforcement learning to navigate unknown 3D environments, detect ArUco markers, and avoid procedurally generated obstacles. Evaluated performance across varying environment complexities, demonstrating the potential of DRL for autonomous UAV missions.